Южный Федеральный Университет
НКБ моделирующих и управляющих систем
Южный Федеральный Университет
НКБ моделирующих и управляющих систем

Основу комплекса составляет имитационная интерактивная среда планирования и контроля, разрабатываемая как виртуальная среда для отработки задач формирования и планирования сценариев внекорабельной деятельности (ВКД) космонавта – оператора робототехнических средств (РТС) космических станций на тренажно-моделирующих комплексах (ТМК).
Графической средой синтеза виртуальной реальности для тренажно-моделирующих комплексов рассматриваемой предметной области является WorldUp – программный комплекс для создания приложений виртуальной реальности и визуального моделирования.
На этапе планирования ВКД осуществляется конструирование траекторий движений виртуальных динамических моделей. В процессе тренажа космонавт-оператор, зафиксированный в передвижном рабочем месте на манипуляторе ERA, должен управлять последним таким образом, чтобы траектория перемещения отклонялась от заданной траектории не более чем на некоторую допустимую величину. Управление движением осуществляется с помощью клавиатуры эмулятора пульта управления, расположенного на передвижном рабочем месте. Слежение на текущим положением передвижного рабочего места относительно поверхности космической станции осуществляется с помощью двух телекамер, закрепленных на секциях манипулятора.
На рисунке 1 представлен кадр визуализации сцены ВКД, иллюстрирующий принцип работы виртуальной модели конструкции «манипулятор ERA – передвижное рабочее место – космонавт», жестко закрепленной на поверхности МКС.

Рисунок 1
Инструктор тренажно-моделирующего комплекса подготовки космонавта имеет возможность наблюдения за работой космонавта в одном из нескольких режимов.
Режимы наблюдения и контроля:
На рисунке 2 показан кадр визуализации ВКД, моделирующий телевизионное изображение зоны обзора (режим широкого поля технического зрения) из внешней точки наблюдения.
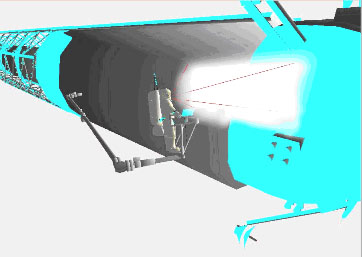
Рисунок 2
Комплекс используется в:




