Южный Федеральный Университет
НКБ моделирующих и управляющих систем
Южный Федеральный Университет
НКБ моделирующих и управляющих систем

количество плоскостей колебаний платформы | 2 |
диапазон рабочих углов в каждой из плоскостей | ± 50° |
диапазон частот колебаний | 0,1 – 3 Гц |
диапазон амплитуд колебаний | 0,1 – 50° |
масса устанавливаемого на платформу оборудования | не более 170 кг |
ПК – персональный компьютер | 1 шт |
ВИП – вторичный источник питания | 3 шт |
Контроллер ВИП | 1 шт |
Модуль контроллера блока управления ПАСУК | 1 шт |
Модуль фильтрации и коррекции | 2 шт |
Модуль МПИ (магистрального последовательного канала) | 2 шт |
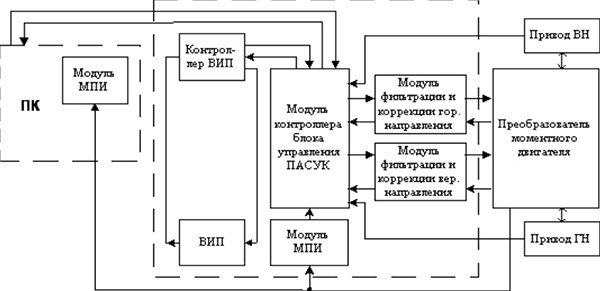
Структурная схема ПАСУК




